myCobot 280 Raspberry Pi
1 Structural Parameters
1.1 Parameters of Robotic Arm
| Indicator | Parameter |
|---|---|
| Name | Baby-Elephant Collaborative Robot Arm |
| Model | Raspberry Pi |
| Degree of freedom | 6 |
| Load | 250g |
| Effective Working Radius | 280mm |
| Repeated Positioning Precision | ±0.5mm |
| Net Weight | 860g |
| Power Input | 8-12V,5A |
| Operational Temperature | -5-45℃ |
| Communication | Type-C |
1.2 Space Parameters of Working
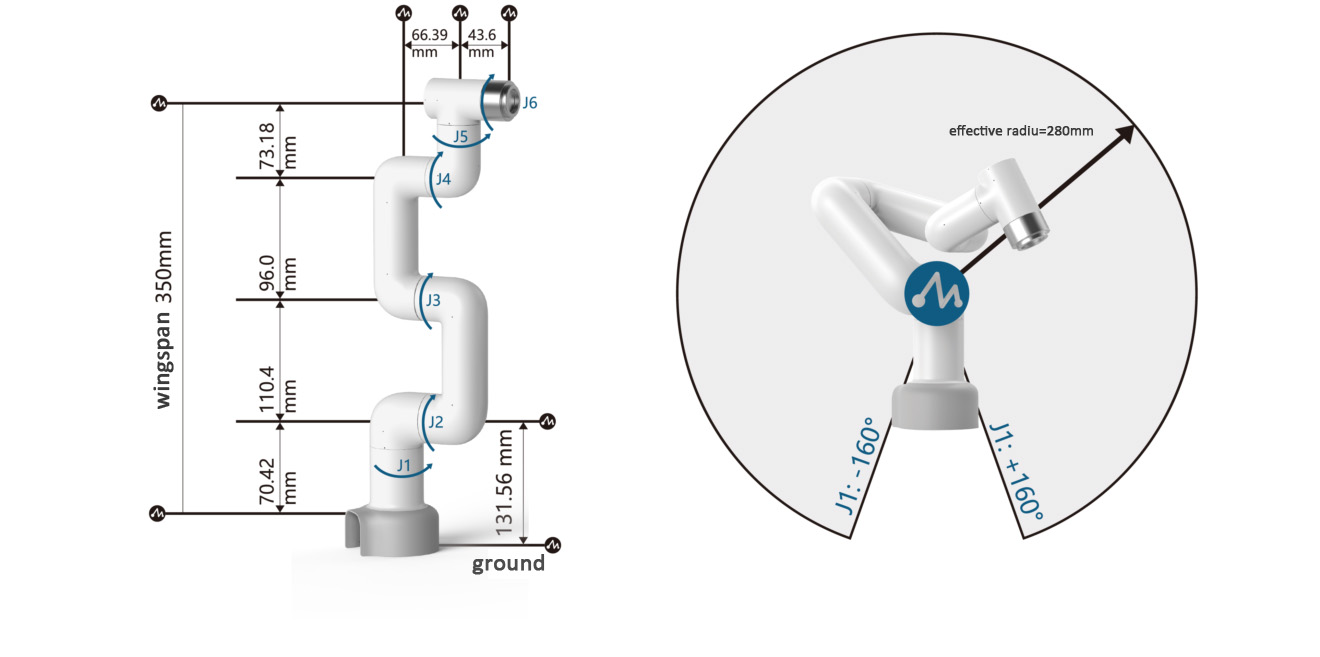
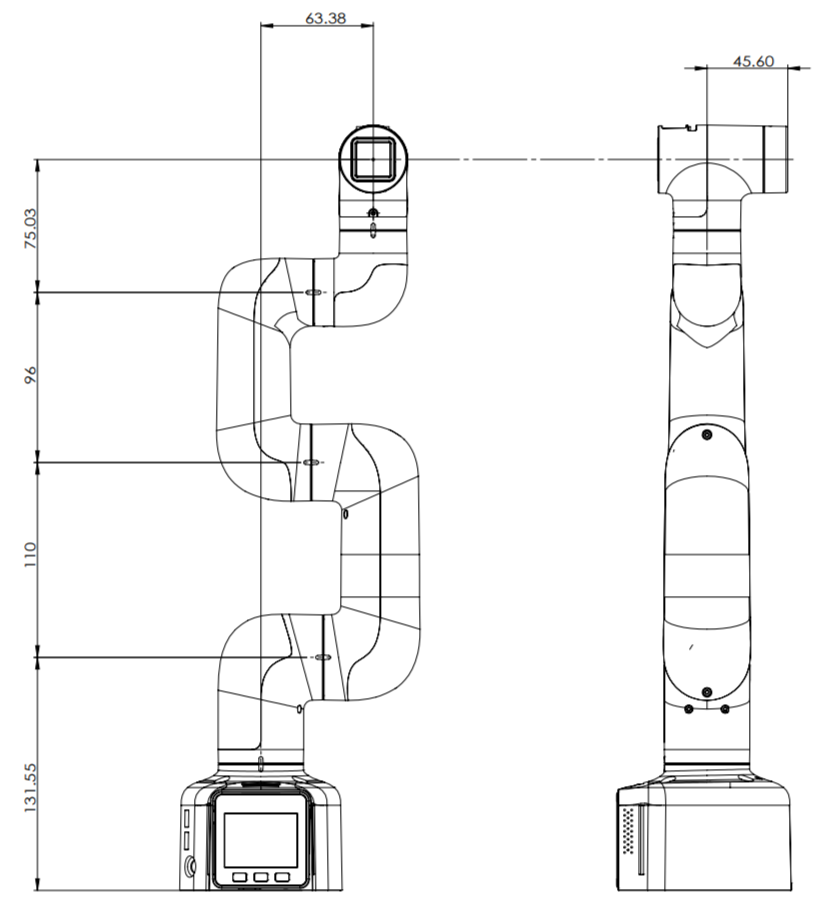
1.3 Diagram of Specification
1.4 Available Angle of Joints
| Joint | Angle |
|---|---|
| J1 | -165 ~ +165 |
| J2 | -165 ~ +165 |
| J3 | -165 ~ +165 |
| J4 | -165 ~ +165 |
| J5 | -165 ~ +165 |
| J6 | -175 ~ +175 |
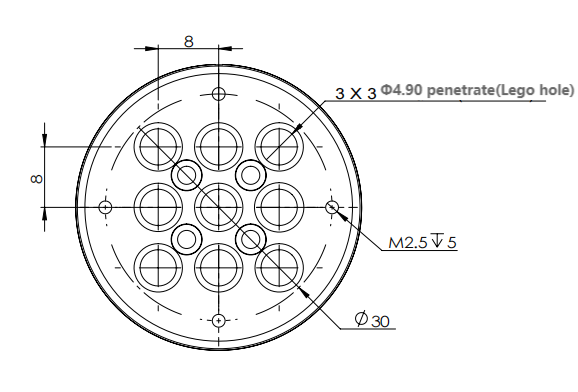
1.5 Installation Based on Positions of Holes
- Pedestal is installed with flange. It is also compatible with installation of LEGO parts and M4 screws.
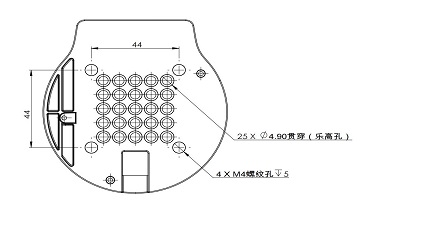
- The end is installed with flange. It is compatible with both LEGO holes and holes for threaded holes of screw .
2 Electronic Parameters
| Indicator | Parameter |
|---|---|
| SOC | Broadcom BCM2711 |
| CPU | 64-bit 1.5GHz quad-core |
| Bluetooth/Wireless | have |
| USB | USB3.0 x2; USB2.0 x2 |
| display screen | without |
| HDMI interface | microHDMI x2 |
| custom button | without |
| IO interface | 40 |
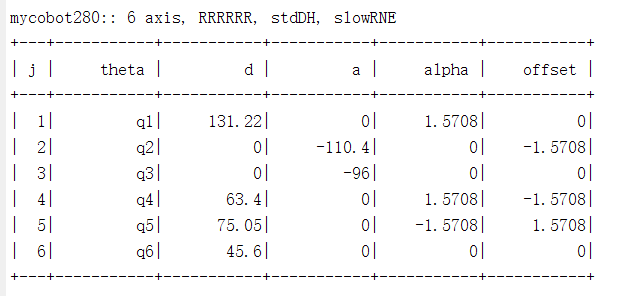
3 DH Parameters

SDH: